Nina Lemarchand
L’idée de ce projet est d’explorer l’intégration de motifs issus de surface conductrices, de dispositifs capacitifs, au sein de la marqueterie. La technologie ne s’ajoute pas à la marqueterie, mais devient une partie de son langage. La technologie capacitive, qui est d’ordinaire invisible, devient alors visible, lisible, et surtout intégrée dans la logique même de composition de la marqueterie. Il ne s’agit donc plus de cacher la technique ou de l’ajouter à un motif existant, mais de faire en sorte que le motif soit la technologie elle-même. L’idée n’est pas de faire cohabiter ces deux niveaux, mais de les faire coïncider.
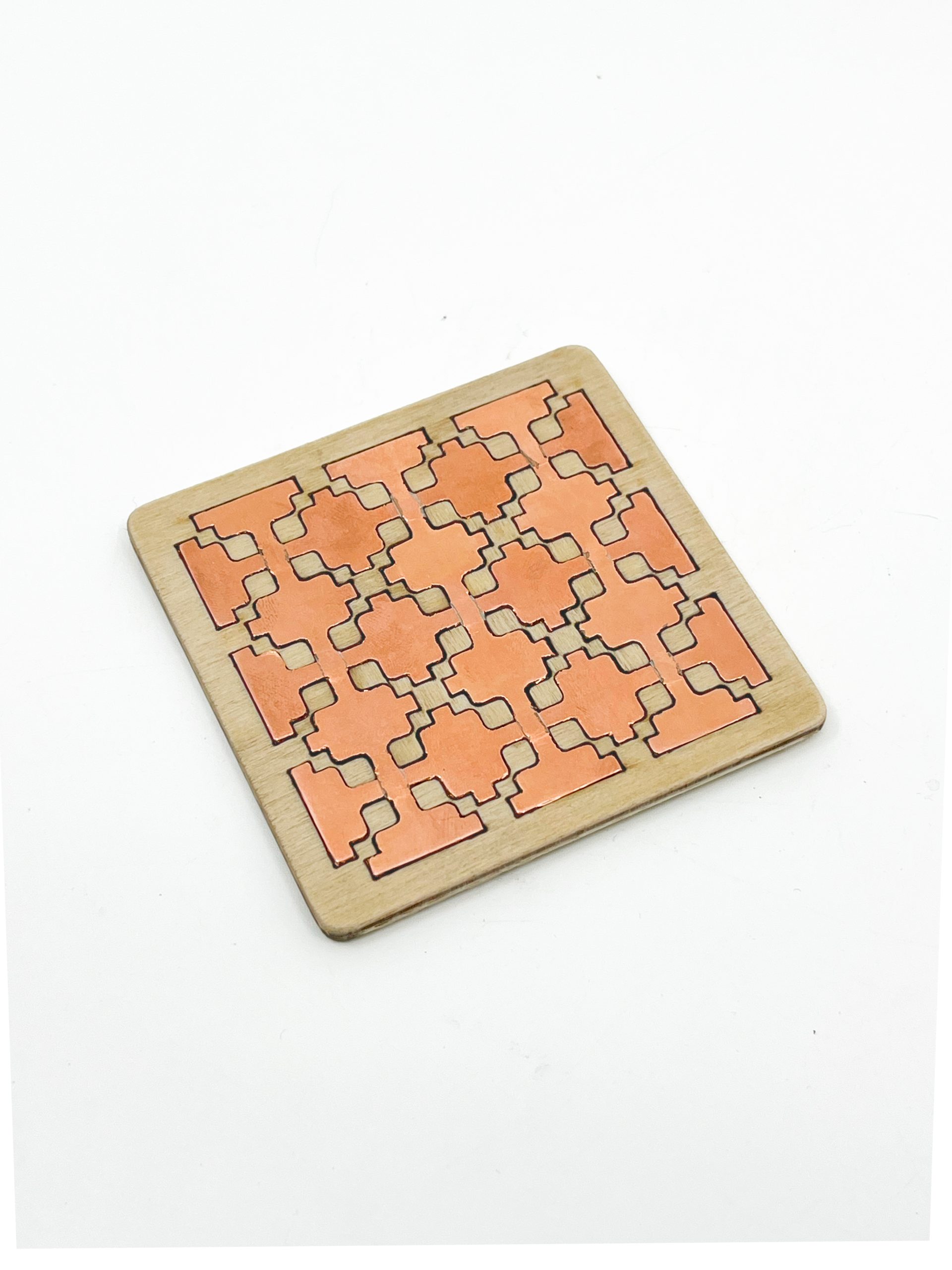
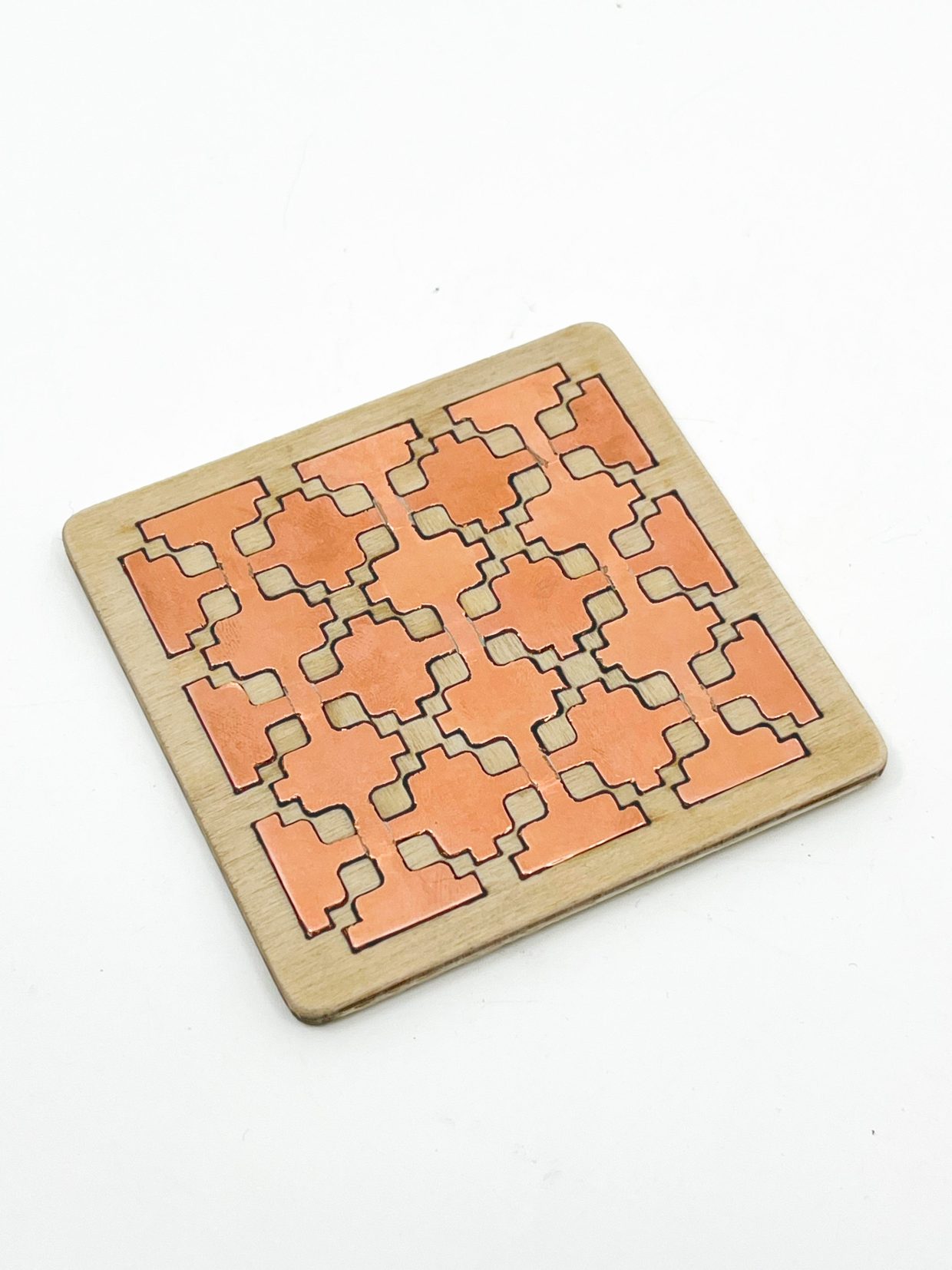
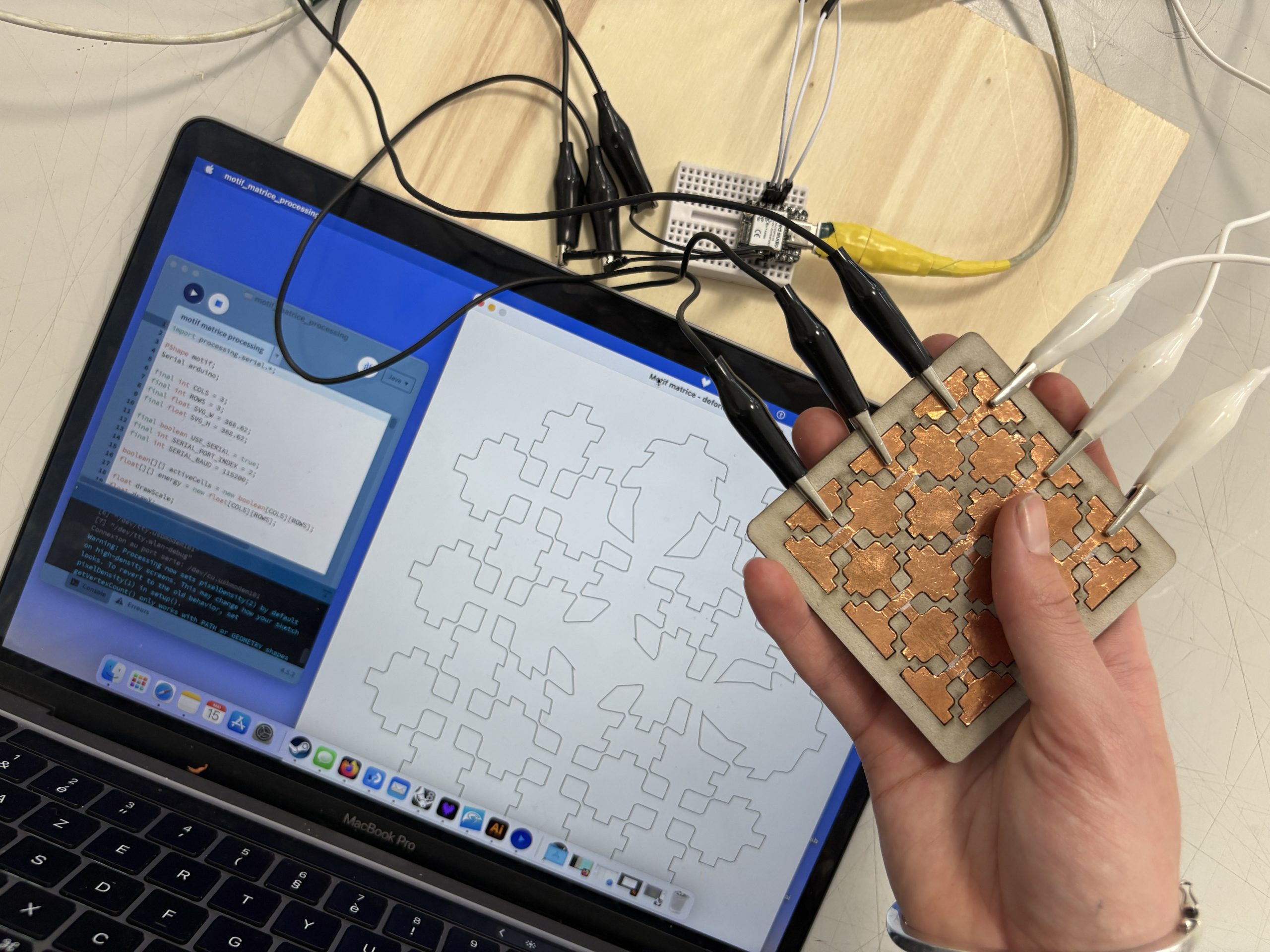
Concrètement, cela m’a amenée à concevoir des motifs de marqueterie qui intègrent des zones conductrices, afin de rendre la surface à la fois lisible visuellement et réactive au toucher. Pour que l’expérience interactive soit intéressante, la marqueterie est reliée à un écran d’ordinateur qui affiche un motif semblable à la marqueterie elle même, et lorsque l’on interagit avec cette dernière, des déformations s’opèrent sur le motif à l’écran.
À quoi ressemble une surface capacitive ? Quel est le principe et comment fonctionne-t-elle ?
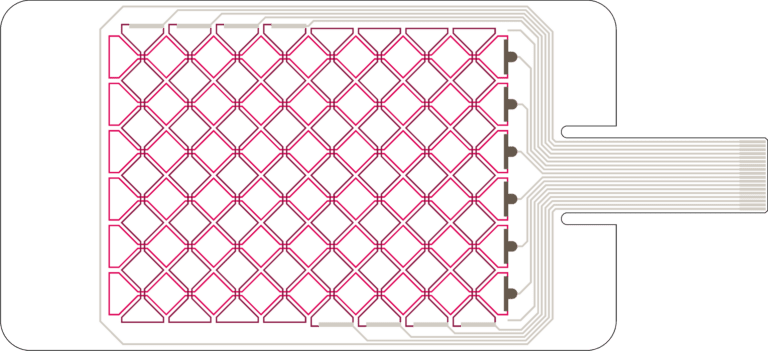
Une surface capacitive à matrice croisée repose sur un réseau de lignes conductrices horizontales et verticales formant une grille, où chaque intersection agit comme un petit condensateur. Lorsqu’un doigt s’approche ou touche la surface, il perturbe localement le champ électrique et modifie la capacité à ces points précis. Le contrôleur mesure ces variations sur la grille pour déterminer la position exacte du contact.
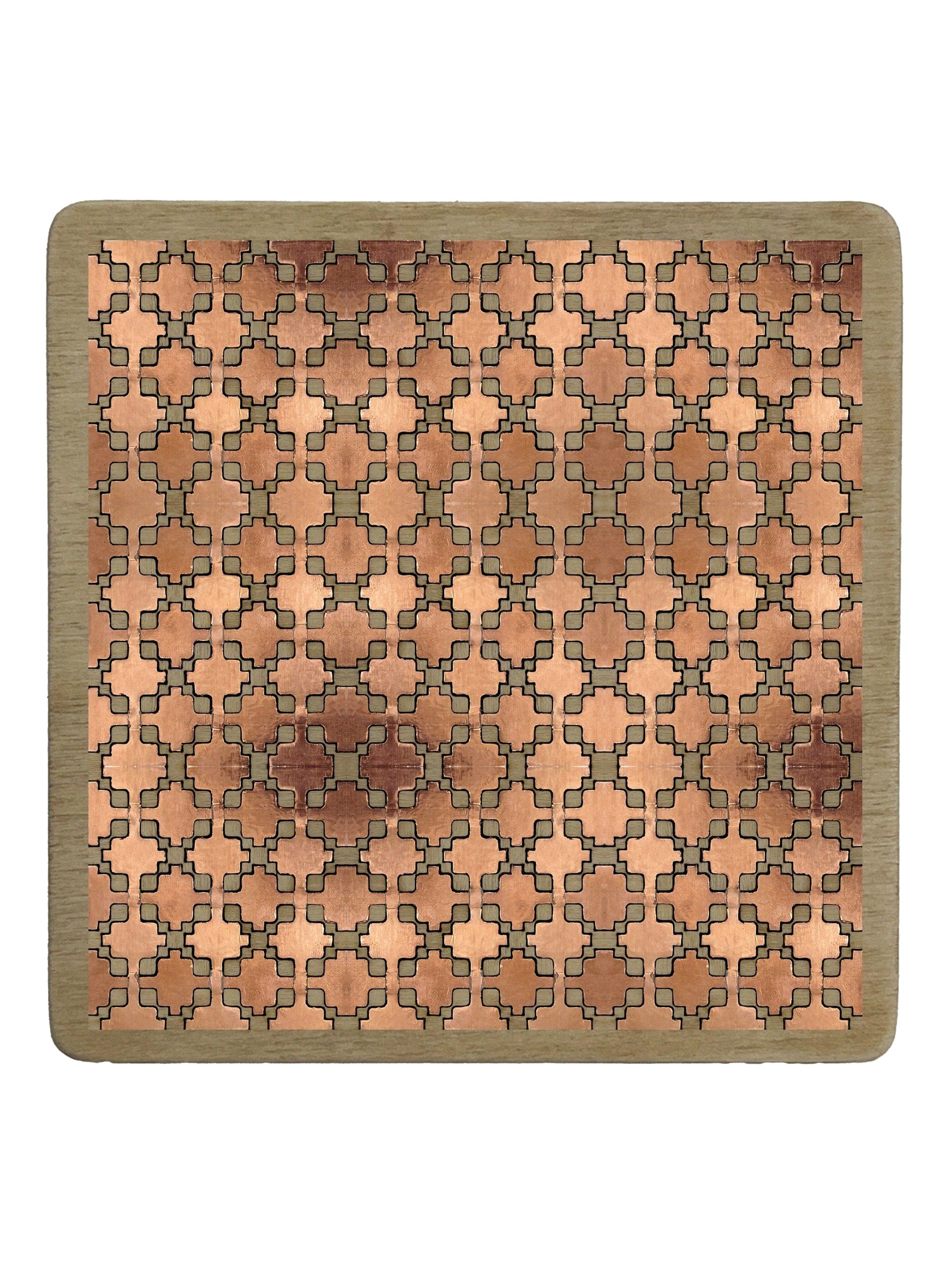
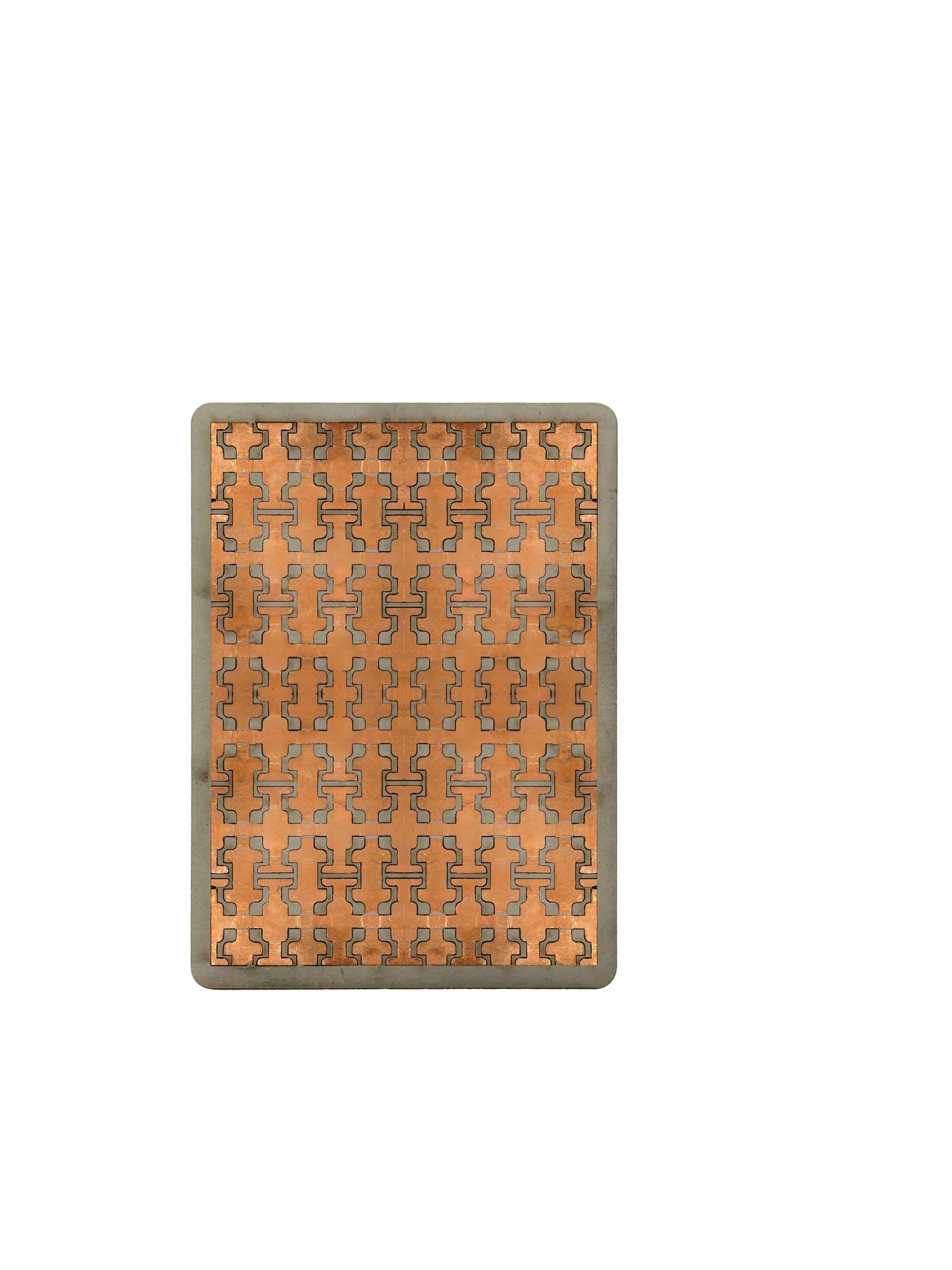
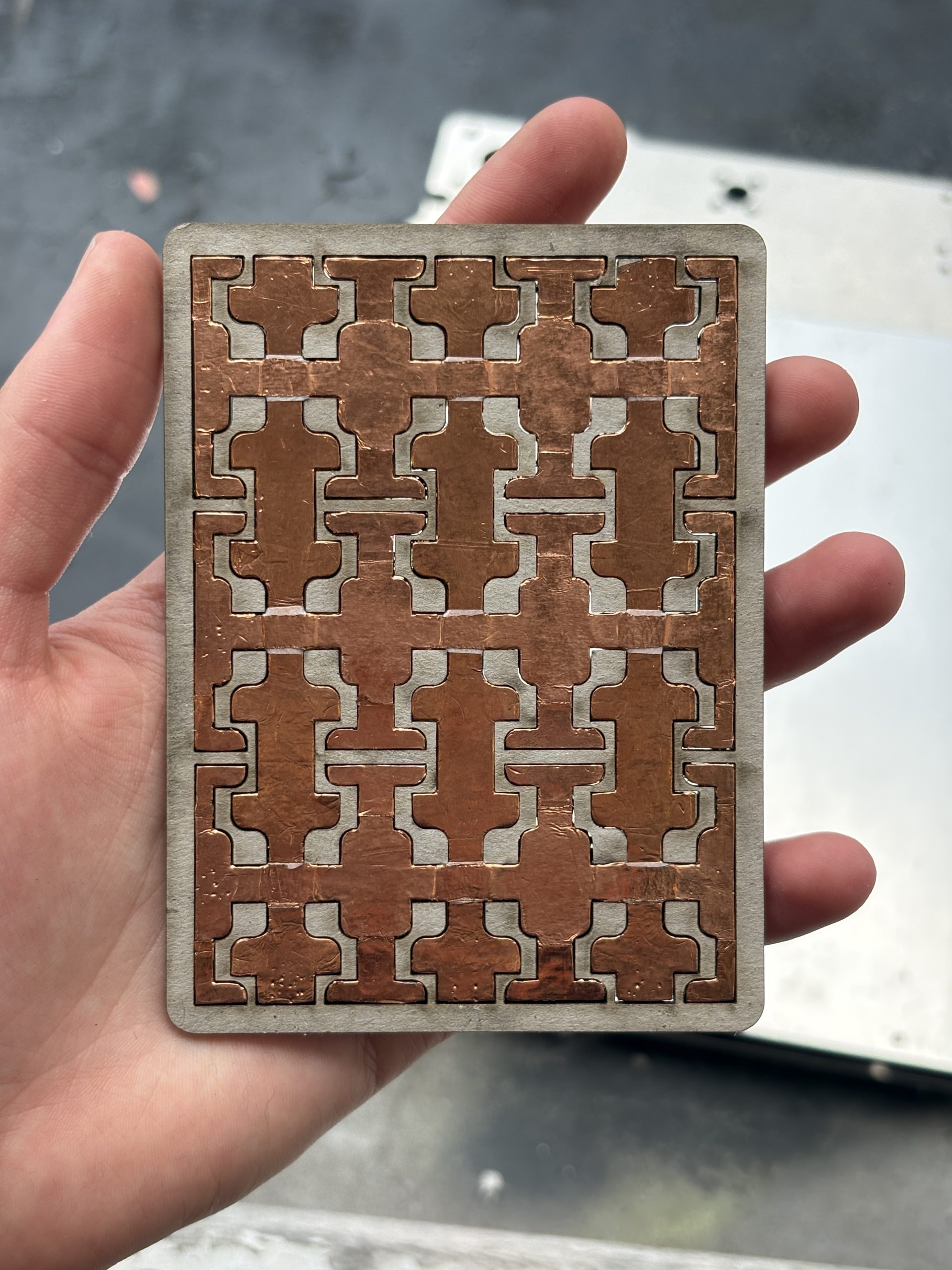
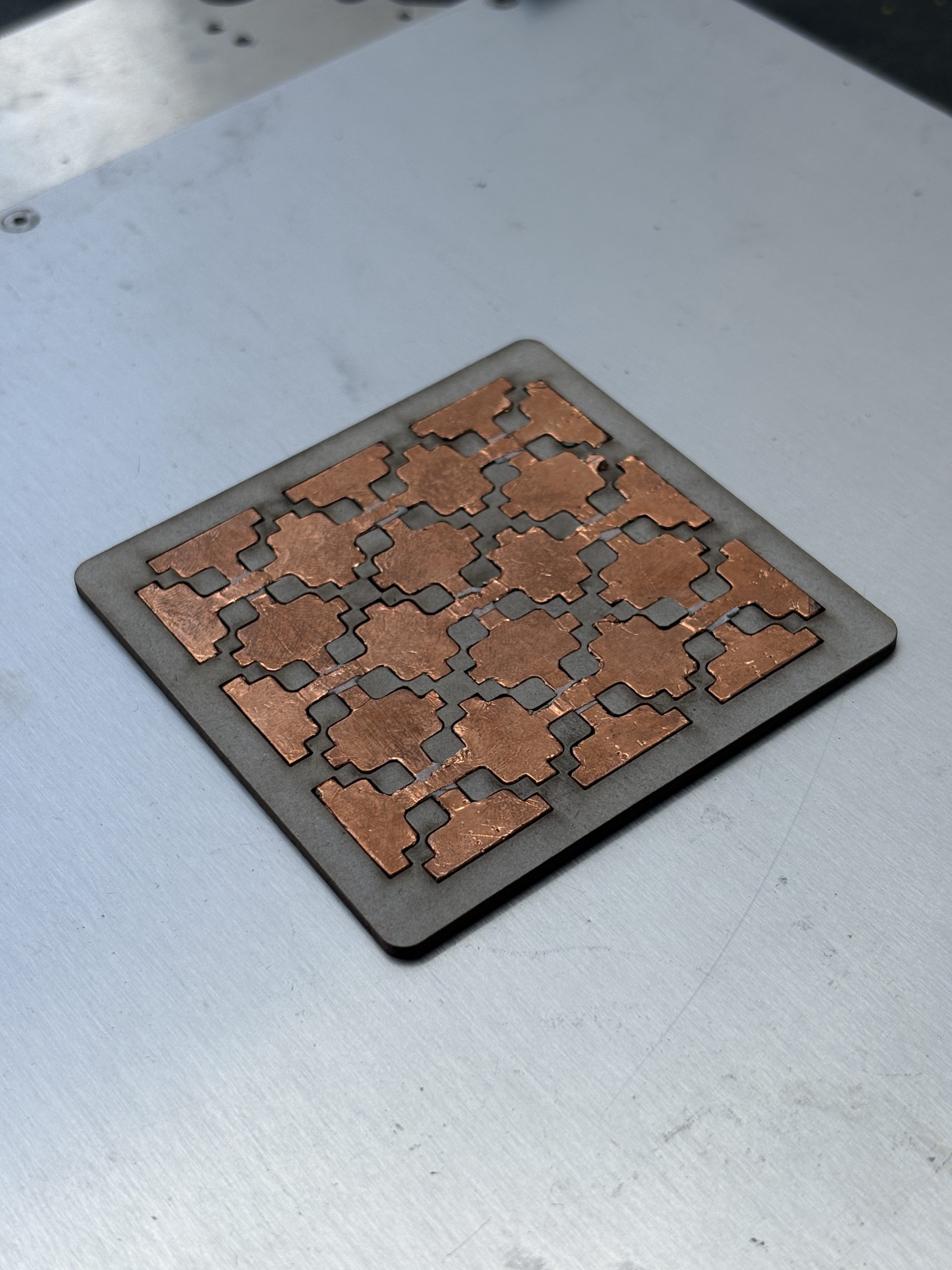
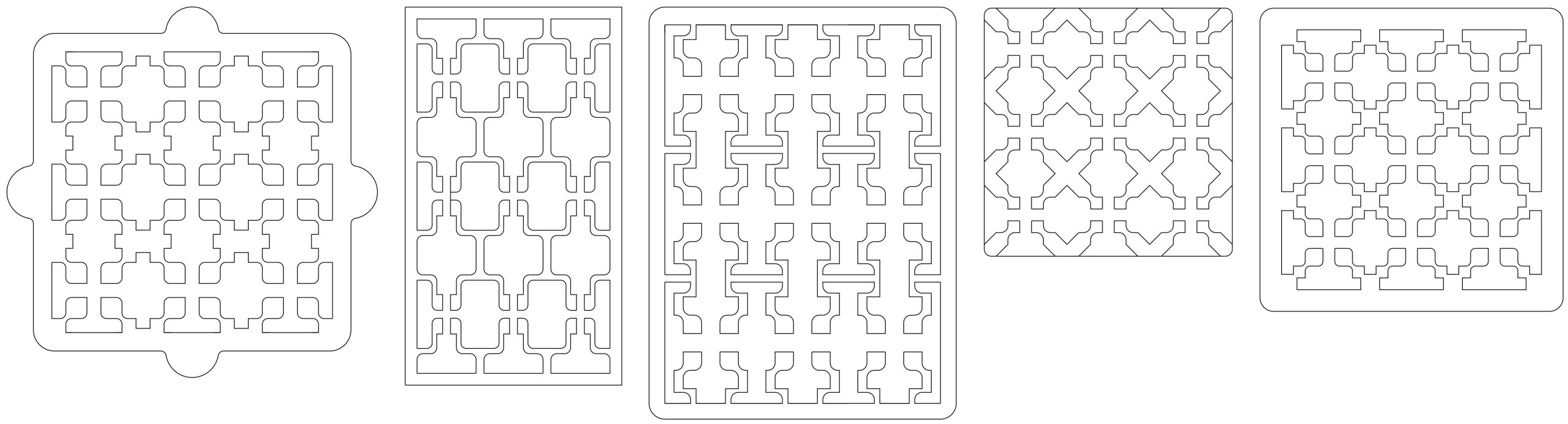
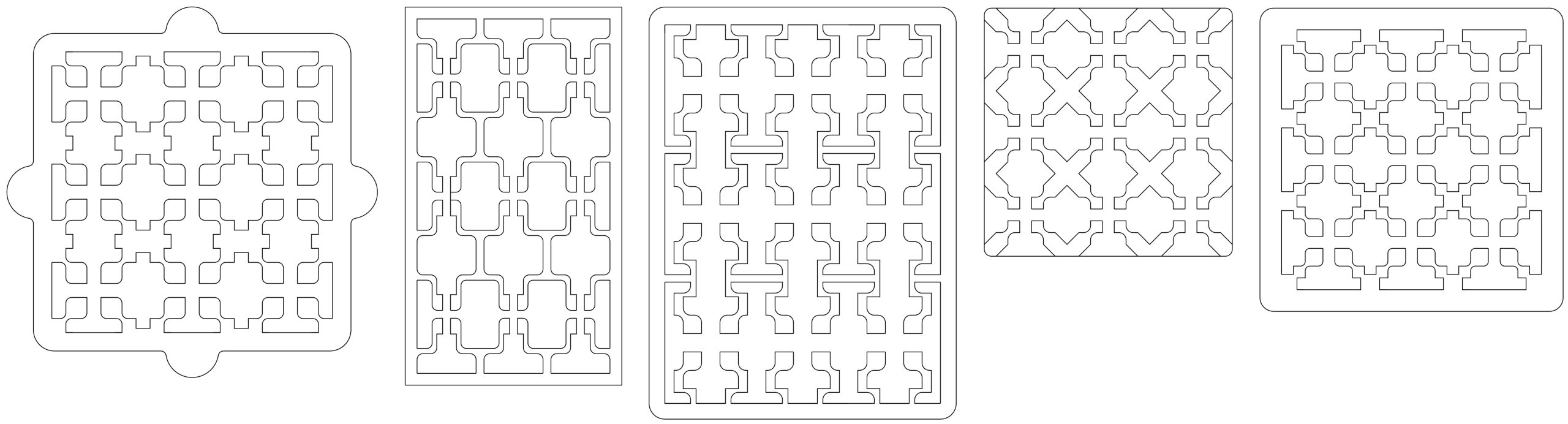
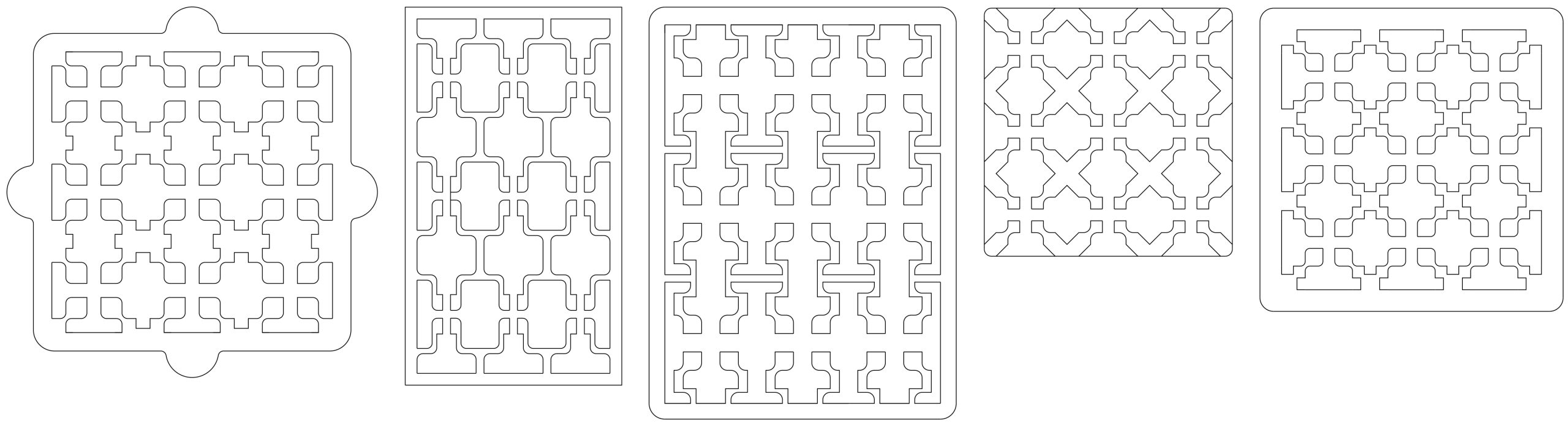
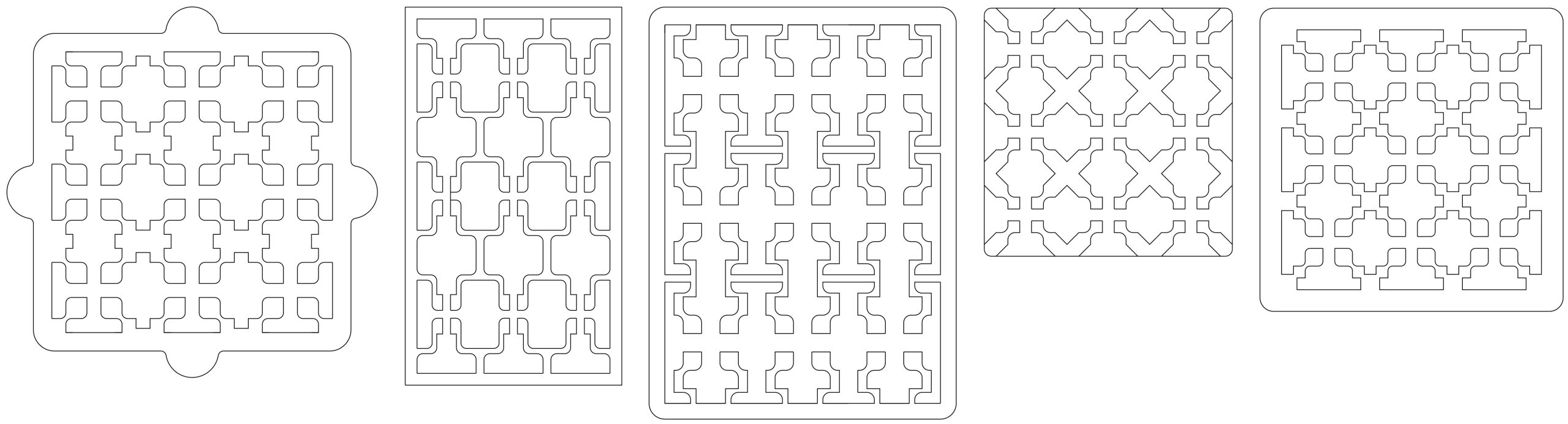
Série de motifs capactifs pensés pour offrir une surface adéquate, qui permette au doigts de toujours être en contact avec une coordonnée X et une coordonnée Y. Ces motifs, dont le dessin est orienté par la contrainte technologique, sont également pensés comme un motif de décor, pas seulement de technique.
La première étape a été de définir une matrice, et de programmer l’arduino, ainsi qu’un motif sur processing qui réagisse à l’interaction avec la marqueterie.
Je suis partie d’une matrice à 6 axes, 3 horizontaux et 3 verticaux.

Procédé :
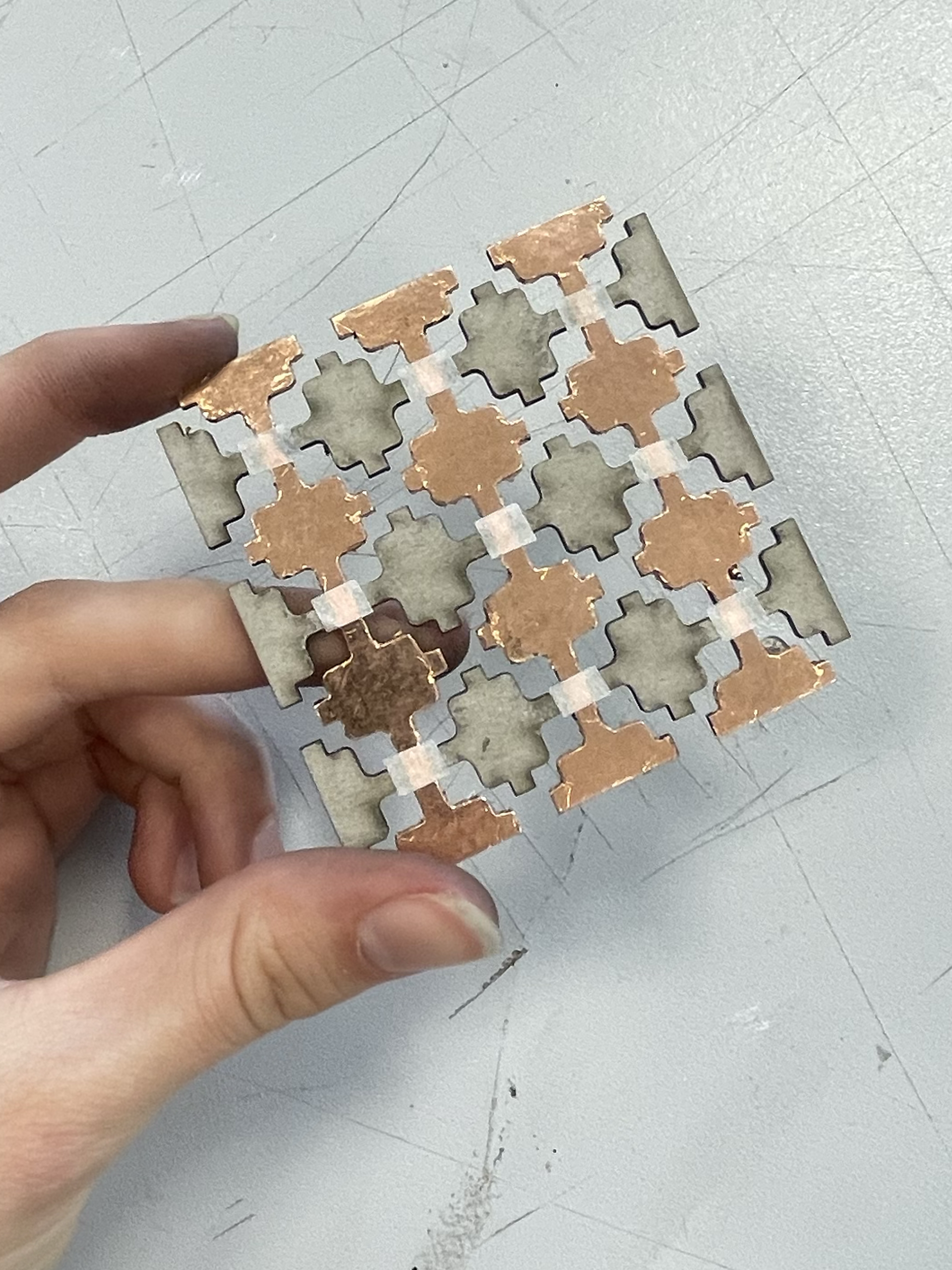
- découpe au laser de la surface marquetée
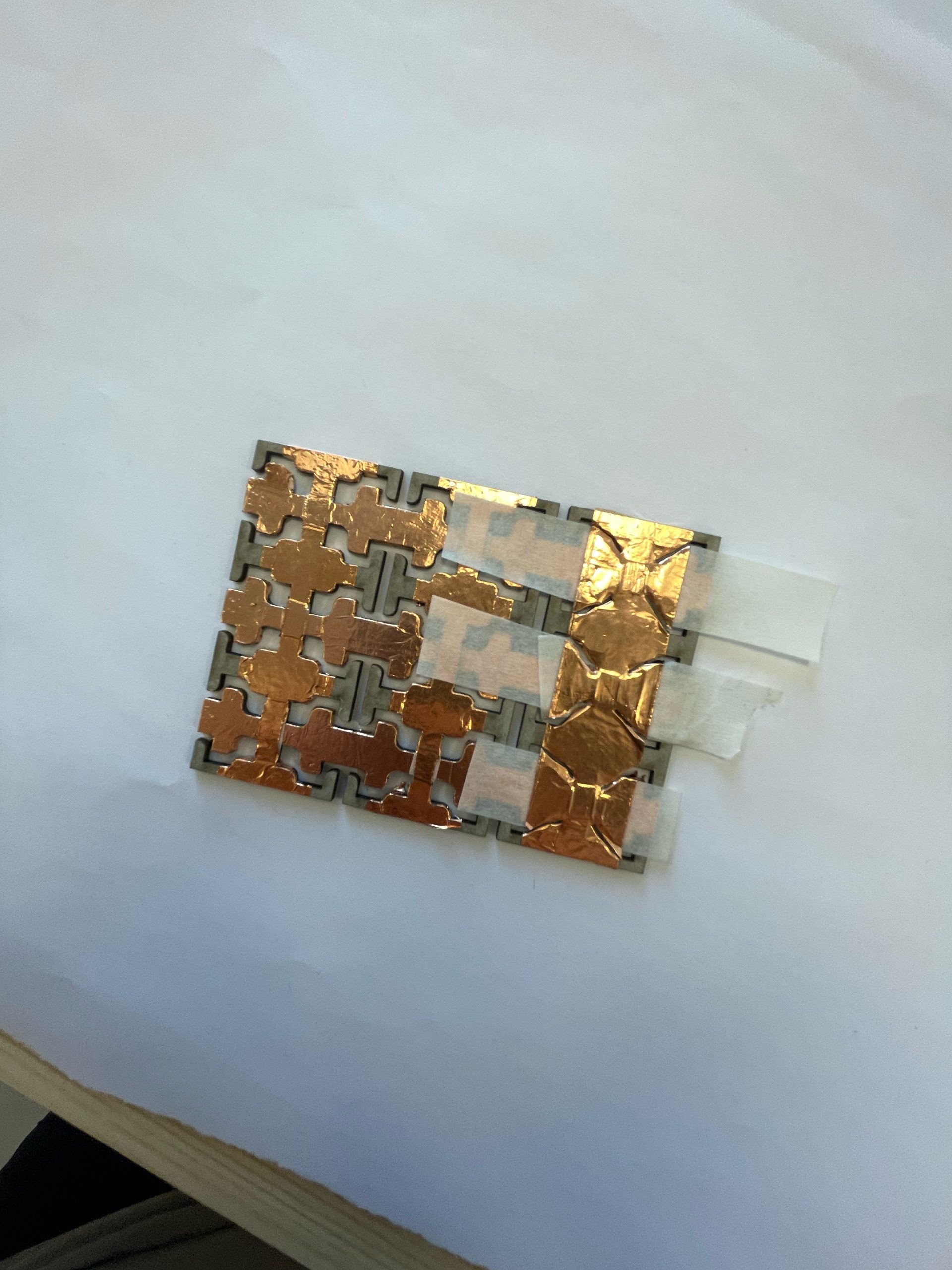
- application du ruban adhésif cuivre sur les lignes horizontales
- protéger les points de superposition de la matrice pour empêcher le contact entre les deux axes
- application du ruban adhésif cuivre sur les lignes verticales (protéger les parties déjà cuivrées)
- relier la marqueterie à l’arduino avec les 6 pinces
Quelles évolutions possible ?
Il serait intéressant de faire évoluer ce projet en réalisant ce principe de marqueterie capacitive sur de plus grande surfaces. L’échelle du motif se doit de rester la même pour répondre à la contrainte du contact du doigt sur l’axe x et y simultanément.
Pour rendre réalisable une marqueterie de cette taille, il faudrait que je découpe la partie cuivrée avec une découpe laser adaptée, pour rendre le protocole de réalisation plus efficace.